KungfuBot:
Physics-Based Humanoid Whole-Body Control for Learning Highly-Dynamic Skills
NeurIPS 2025 (San Diego, United States)
Weiji Xie*,
Jinrui Han*, Jiakun Zheng*, Huanyu Li, Xinzhe Liu, Jiyuan Shi, Weinan Zhang, Chenjia Bai†, Xuelong Li.
[PDF]
|
[CODE]
|
[DEMO]
|
[TALK]
Abstract:
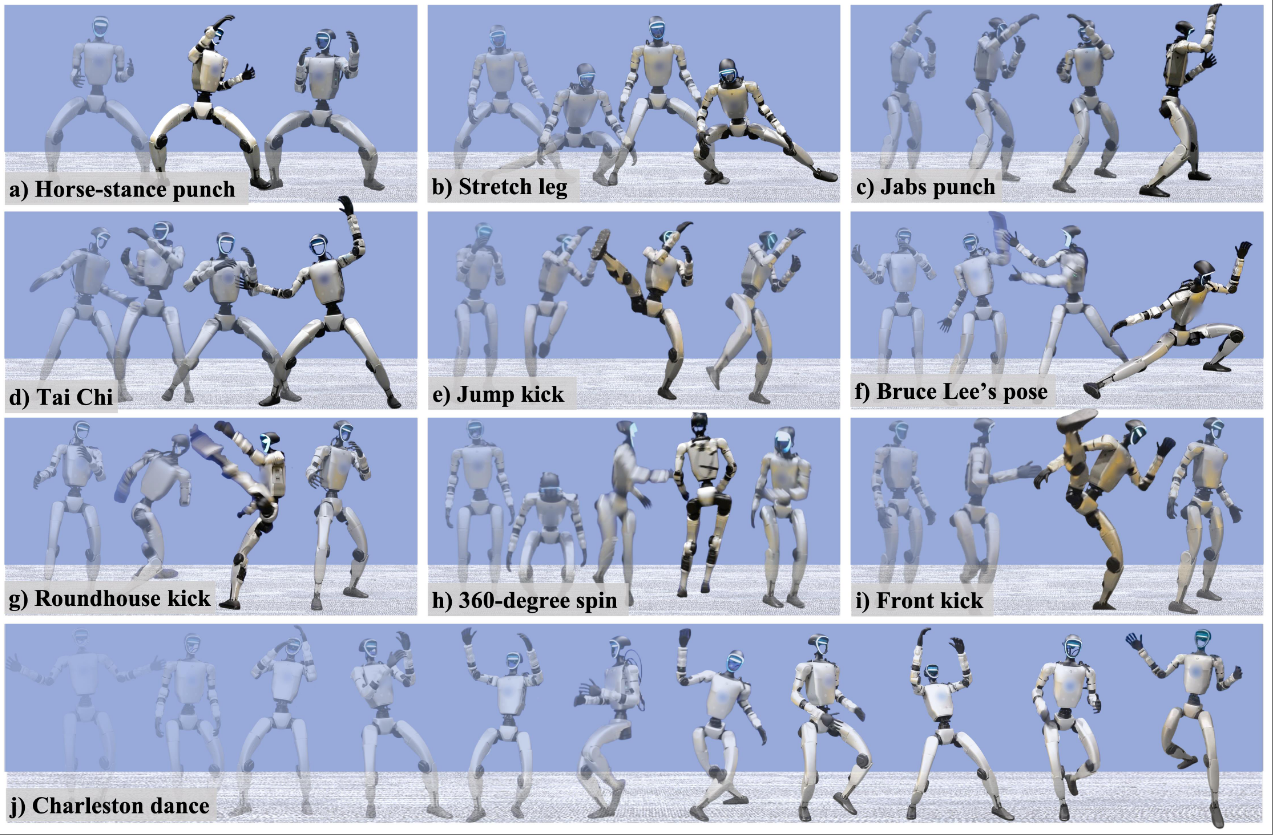
Humanoid robots are promising to acquire various skills by imitating human behaviors. However, existing algorithms are only capable of tracking smooth, low-speed human motions, even with delicate reward and curriculum design. This paper presents a physics-based humanoid control framework,
aiming to master highly-dynamic human behaviors such as Kungfu and dancing through multi-steps motion processing and adaptive motion tracking. For motion processing, we design a pipeline to extract, filter out, correct, and retarget motions, while ensuring compliance with physical constraints to the maximum extent. For motion imitation, we formulate a bi-level optimization problem to dynamically adjust the tracking accuracy tolerance based on the current tracking error, creating an adaptive curriculum mechanism. We further construct an asymmetric actor-critic framework for policy training. In experiments, we train whole-body control policies to imitate a set of highly-dynamic motions. Our method achieves significantly lower tracking errors than existing approaches and is successfully deployed on the Unitree G1 robot, demonstrating stable and expressive behaviors.
... See More